學校電子電路實驗室裡,
一組實驗桌上有示波器、訊號產生器、電源供應器以及一台電腦,
隨便估算一下也要十幾萬,
實在不是適合拿來當玩具的工具。

-3.5對RCA接頭一條
用這種3.5對紅白接頭的音源線,
是為了方便同時有兩個channel的input時,
兩個訊號可以有各自的GND可以使用。

-小型探棒、小歐洲夾

小探棒是在電子材料行尋寶的時候發現的,
就跟一般示波器的探棒一樣,前端有個小鉤子

-USB音效卡
為了避免搞壞原本電腦上的音效卡,就用便宜的外接音效卡來當ADC

把3.5對RCA線的RCA端剪下去皮後,
裸露的銅線是地線,而紅線及白線就是兩個channel

放入熱縮套管,把探棒跟端子焊上

將做好的訊號線插到音效卡的麥克風輸入

來看看arduino所輸出的pwm波形吧
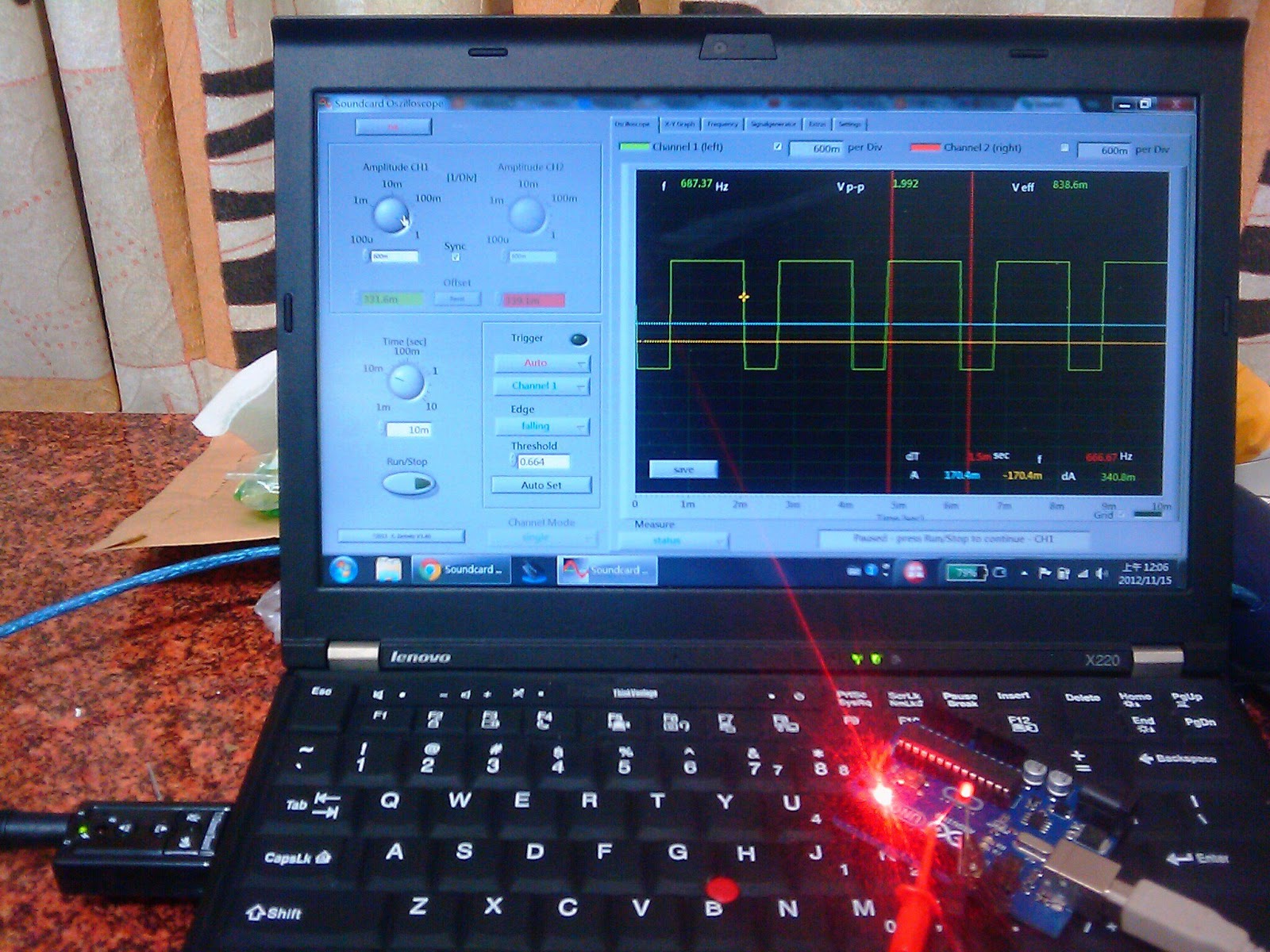
波形滿漂亮的阿!!
音效卡示波器測量的頻率最高約只能到20k Hz(就是人類的聽力範圍)
雖然跟真正的示波器差得遠了,但拿來當玩具的也堪用了。
要注意的是直接輸入的訊號不能超過兩伏,
因為音效卡無法承受那麼大的訊號,
要不就是要再修改音效卡的電路。
軟體的部份
在Windows底下可以使用soundcard scope
而LINUX環境則可以用xoscope
但我還無法讓xoscope讀到usb音效卡的訊號,
只能使用電腦本身的音效卡,
怕死的我還是不甘願的打開Windows,使用usb音效卡當輸入了。
改天再來做訊號產生器吧。
材料
3.5 to RCA----------20 (元/個)
USB音效卡----------70 (元/個)
探棒-------------------5 (元/個)
小歐洲夾--------------5 (元/個)
熱縮套管
銲錫


